Introduction
This is an example that use Ponca to compute surface curvature with Point Cloud Library (PCL) (recommended version: 1.9) It provides a class implementation to be incorporate in the PCL tree, section "features", and a method to use that feature and visualize data using a colormap.
Usage
To compile this example, you need to enable the compilation of the examples with cmake, and build the examples:
cmake [..] -DPONCA_CONFIGURE_EXAMPLES=ON
make ponca-examples
- Note
- Tip if you are using visual studio: if you have a problem with boost or pcl exceptions, go to Project -> Properties -> C/C++ -> Code Generation -> Enable C++ exceptions and turn it to "Yes (/EHsc)"
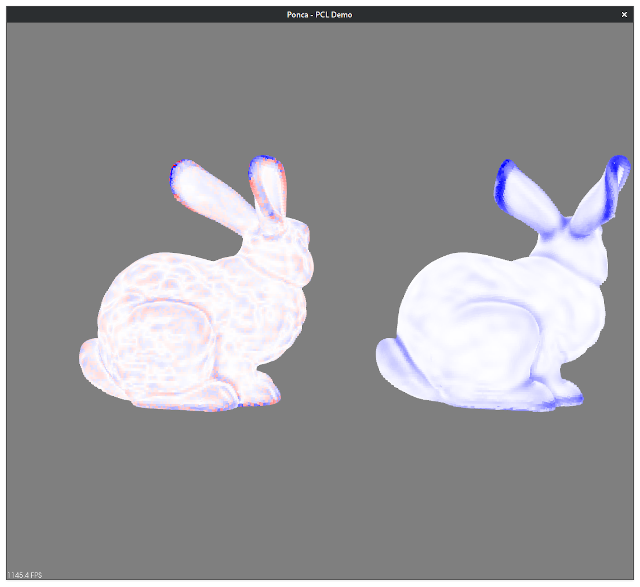
Then execute the program and you will visualize two color point clouds: on the left, the signed curvature estimated using Ponca, and on the right, the unsigned curvature estimated using PCL.
Surface Curvature on a point cloud using GLS method
PCL wrapper
Here is the PCL implementation of our method.
Datastructures declaration
GlsPoint defines how point samples are represented,pcl::GlsCurvature defines the wrapper that brings Ponca algorithms into the PCL API
Source file: pcl_wrapper.h
#pragma once
#include <pcl/features/feature.h>
#include <Ponca/src/Common/pointTypes.h>
namespace pcl
{
template <typename PointInT, typename PointOutT>
class GlsCurvature : public Feature<PointInT, PointOutT>
{
using Feature<PointInT, PointOutT>::feature_name_;
using Feature<PointInT, PointOutT>::getClassName;
using Feature<PointInT, PointOutT>::indices_;
using Feature<PointInT, PointOutT>::input_;
using Feature<PointInT, PointOutT>::surface_;
using Feature<PointInT, PointOutT>::k_;
using Feature<PointInT, PointOutT>::search_radius_;
using Feature<PointInT, PointOutT>::search_parameter_;
using PointCloudOut = typename Feature<PointInT, PointOutT>::PointCloudOut;
using PointCloudConstPtr = typename Feature<PointInT, PointOutT>::PointCloudConstPtr;
public:
GlsCurvature() { feature_name_ = "GlsCurvature"; }
void computeCurvature(const PointCloud<PointInT>& cloud, int p_idx, const std::vector<int>& indices,
float& curvature);
protected:
void computeFeature(PointCloudOut& output) override;
private:
static void computeFeatureEigen(PointCloud<Eigen::MatrixXf>& output) {}
};
}
Aggregator class used to declare specialized structures using CRTP.
Datastructures implementation
Source file: pcl_wrapper.hpp
#pragma once
#include <Ponca/Ponca>
#include "pcl_wrapper.h"
#include <pcl/common/point_tests.h>
template <typename PointInT, typename PointOutT>
void pcl::GlsCurvature<PointInT, PointOutT>::computeFeature(PointCloudOut& output)
{
std::vector<int> nn_indices(k_);
std::vector<float> nn_dists(k_);
output.is_dense = true;
if (input_->is_dense)
{
for (size_t idx = 0; idx < indices_->size(); ++idx)
{
if (this->searchForNeighbors((*indices_)[idx], search_parameter_, nn_indices, nn_dists) == 0)
{
output.points[idx].curvature = std::numeric_limits<float>::quiet_NaN();
output.is_dense = false;
continue;
}
computeCurvature(*surface_, (*indices_)[idx], nn_indices, output.points[idx].curvature);
}
}
else
{
for (size_t idx = 0; idx < indices_->size(); ++idx)
{
if (!pcl::isFinite((*input_)[(*indices_)[idx]]) ||
this->searchForNeighbors((*indices_)[idx], search_parameter_, nn_indices, nn_dists) == 0)
{
output.points[idx].curvature = std::numeric_limits<float>::quiet_NaN();
output.is_dense = false;
continue;
}
computeCurvature(*surface_, (*indices_)[idx], nn_indices, output.points[idx].curvature);
}
}
}
template <typename PointInT, typename PointOutT>
void pcl::GlsCurvature<PointInT, PointOutT>::computeCurvature(const pcl::PointCloud<PointInT>& cloud, int p_idx,
const std::vector<int>& indices, float& curvature)
{
using Scalar = GlsPoint::Scalar;
Fit fit;
fit.setNeighborFilter({cloud.points[p_idx].getVector3fMap(), float(search_radius_)});
fit.init();
for (int id : indices)
{
fit.addNeighbor(GlsPoint(cloud.points[id].getVector3fMap(), cloud.points[id].getNormalVector3fMap()));
}
if (fit.isStable())
{
curvature = fit.kMean();
}
else
{
curvature = std::numeric_limits<float>::quiet_NaN();
}
}
#define PCL_INSTANTIATE_GlsCurvature(T, OutT) template class PCL_EXPORTS pcl::GlsCurvature<T, OutT>;
Aggregator class used to declare specialized structures with derivatives computations,...
Compute a Weingarten map from the spatial derivatives of the normal field .
FIT_RESULT finalize()
Finalize the procedure.
@ FitScaleSpaceDer
Flag indicating a scale-space differentiation.
CovariancePlaneDerImpl< DataPoint, _NFilter, DiffType, CovarianceDer< DataPoint, _NFilter, DiffType, MeanPositionDer< DataPoint, _NFilter, DiffType, T > > > CovariancePlaneDer
Helper alias for Plane fitting on 3D points using CovariancePlaneFitImpl.
Compute principal curvatures from a base class providing fundamental forms.
Datastructures instanciation
Source file: pcl_wrapper.cpp
#include <pcl/point_types.h>
#include <pcl/impl/instantiate.hpp>
#include "pcl_wrapper.h"
#include "pcl_wrapper.hpp"
PCL_INSTANTIATE_PRODUCT(GlsCurvature, ((pcl::PointNormal)(pcl::PointXYZRGBNormal)(pcl::PointXYZINormal))(
(pcl::PointNormal)(pcl::PointXYZRGBNormal)(pcl::PointXYZINormal)));
Main program
Now, a basic method to use the previous class and to visualize the result.
#include <boost/thread/thread.hpp>
#include <pcl/point_types.h>
#include <pcl/io/ply_io.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/features/principal_curvatures.h>
#include <pcl/features/normal_3d.h>
#include <pcl/visualization/pcl_plotter.h>
#include <pcl/common/time.h>
#include "pcl_wrapper.h"
struct Color
{
double r, g, b;
};
Color getColor(float value, float min_value, float max_value)
{
Color c = {1.0, 1.0, 1.0};
double dv;
if (value == 0.)
{
return c;
}
if (value < min_value)
{
value = min_value;
}
if (value > max_value)
{
value = max_value;
}
dv = max_value - min_value;
if (value < (min_value + 0.5 * dv))
{
c.r = 2 * (value - min_value) / dv;
c.g = 2 * (value - min_value) / dv;
c.b = 1;
}
else
{
c.b = 2 - 2 * (value - min_value) / dv;
c.g = 2 - 2 * (value - min_value) / dv;
c.r = 1;
}
return c;
}
int main()
{
pcl::PointCloud<pcl::PointNormal>::Ptr cloud(new pcl::PointCloud<pcl::PointNormal>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_without_normals(new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPLYFile<pcl::PointXYZ>("bun_zipper.ply", *cloud_without_normals) == -1)
{
PCL_ERROR("bun_zipper.ply \n");
return (-1);
}
float radius = 0.005;
pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> ne;
ne.setInputCloud(cloud_without_normals);
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>());
ne.setSearchMethod(tree);
pcl::PointCloud<pcl::Normal>::Ptr normals(new pcl::PointCloud<pcl::Normal>);
ne.setRadiusSearch(radius);
ne.compute(*normals);
pcl::concatenateFields(*cloud_without_normals, *normals, *cloud);
pcl::GlsCurvature<pcl::PointNormal, pcl::PointNormal> ne2;
ne2.setInputCloud(cloud);
pcl::search::KdTree<pcl::PointNormal>::Ptr tree2(new pcl::search::KdTree<pcl::PointNormal>());
ne2.setSearchMethod(tree2);
pcl::PointCloud<pcl::PointNormal>::Ptr output_cloud(new pcl::PointCloud<pcl::PointNormal>);
ne2.setRadiusSearch(radius);
{
pcl::ScopeTime t1("Curvature computation using Ponca");
ne2.compute(*output_cloud);
}
pcl::PrincipalCurvaturesEstimation<pcl::PointXYZ, pcl::Normal> pce;
pce.setInputCloud(cloud_without_normals);
pce.setInputNormals(normals);
pce.setSearchMethod(tree);
pce.setRadiusSearch(radius);
pcl::PointCloud<pcl::PrincipalCurvatures>::Ptr principalCurvatures(new pcl::PointCloud<pcl::PrincipalCurvatures>());
{
pcl::ScopeTime t1("Curvature computation using PCL");
pce.compute(*principalCurvatures);
}
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud_rgb1(new pcl::PointCloud<pcl::PointXYZRGB>),
cloud_rgb2(new pcl::PointCloud<pcl::PointXYZRGB>);
std::vector<double> curvBuffer1(cloud->size()),
curvBuffer2(cloud->size());
for (size_t i = 0; i < cloud->size(); ++i)
{
float curvature1 = 1.f / 6000.f * output_cloud->points[i].curvature;
curvBuffer1[i] = curvature1;
float curvature2 = 1.f / 0.5f * (principalCurvatures->points[i].pc1 + principalCurvatures->points[i].pc2) / 2.f;
curvBuffer2[i] = curvature2;
Color c1 = getColor(curvature1, -0.5f, 0.5f);
Color c2 = getColor(-curvature2, -0.5f, 0.5f);
pcl::PointXYZRGB point;
point.x = cloud->points[i].x;
point.y = cloud->points[i].y;
point.z = cloud->points[i].z;
point.r = c1.r * 255;
point.g = c1.g * 255;
point.b = c1.b * 255;
cloud_rgb1->points.push_back(point);
point.r = c2.r * 255;
point.g = c2.g * 255;
point.b = c2.b * 255;
cloud_rgb2->points.push_back(point);
}
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(
new pcl::visualization::PCLVisualizer("Ponca - PCL Demo"));
viewer->setBackgroundColor(0.5, 0.5, 0.5);
pcl::visualization::PointCloudColorHandlerRGBField<pcl::PointXYZRGB> rgb1(cloud_rgb1);
viewer->addPointCloud<pcl::PointXYZRGB>(cloud_rgb1, rgb1, "Ponca estimation");
pcl::visualization::PointCloudColorHandlerRGBField<pcl::PointXYZRGB> rgb2(cloud_rgb2);
viewer->addPointCloud<pcl::PointXYZRGB>(cloud_rgb2, rgb2, "PCL estimation");
Eigen::Affine3f tr{Eigen::Affine3f::Identity()};
tr.translate(Eigen::Vector3f{0.1, -0.1, 0.4});
viewer->updatePointCloudPose("Ponca estimation", tr);
tr.translate(Eigen::Vector3f{-0.2, 0.0, 0.0});
viewer->updatePointCloudPose("PCL estimation", tr);
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 5, "Ponca estimation");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 5, "PCL estimation");
viewer->initCameraParameters();
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
}
}